
摘要:本文介绍了机器人码垛程序实例,展示了自动化生产线上的智能搬运系统。该系统通过机器人技术实现物料自动搬运、码垛和存储,提高了生产效率和物流自动化水平。该系统具有高度的灵活性和适应性,可广泛应用于各种生产场景,为企业节省人力成本,提高生产效率,推动工业自动化进程。
本文目录导读:
随着工业自动化技术的不断发展,机器人码垛系统在生产线上的应用越来越广泛,机器人码垛程序是实现机器人自动化搬运、堆叠物品的关键技术之一,本文将通过具体的实例,介绍机器人码垛程序的设计、实现及其在自动化生产线上的应用。
机器人码垛系统概述
机器人码垛系统是一种自动化生产线上的智能搬运系统,主要由机器人、传感器、控制系统等组成,机器人码垛程序是控制机器人进行物品搬运、堆叠的核心软件,通过编写合理的码垛程序,可以实现机器人对物品的精准定位、抓取、搬运和堆叠,提高生产效率和降低人工成本。
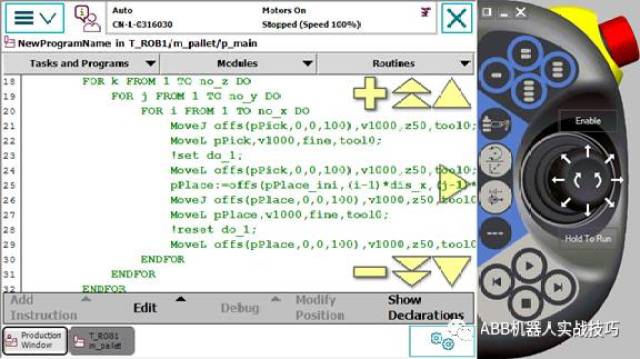
机器人码垛程序实例
以某制造业企业的自动化生产线为例,该生产线需要对金属零件进行码垛操作,针对这一需求,我们设计并实现了一个机器人码垛程序。
1、需求分析
在自动化生产线上,金属零件需要从生产线上转运到仓库或包装区域,由于金属零件的形状、大小和重量各异,需要确保机器人能够精准地抓取、搬运和堆叠零件,避免零件损坏和安全事故。
2、机器人及传感器配置
为了满足需求,我们选择了具有高强度、高精度的工业机器人,并配备了视觉传感器和触碰传感器,视觉传感器用于识别零件的位置和形状,触碰传感器用于检测零件的材质和硬度,确保机器人能够安全、精准地抓取零件。
3、机器人码垛程序设计
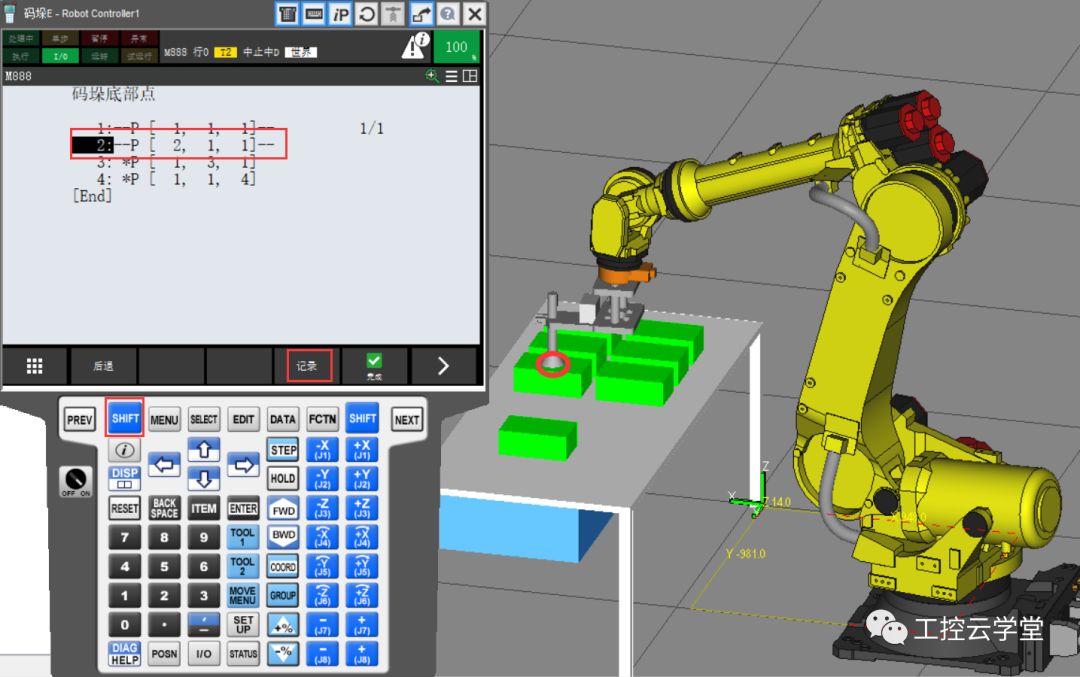
(1)定位与识别:通过视觉传感器,机器人对金属零件进行定位与识别,获取零件的位置、形状和大小等信息。
(2)路径规划:根据零件的位置信息,机器人控制系统规划最优路径,确保机器人能够安全、高效地到达零件所在位置。
(3)抓取操作:机器人根据触碰传感器的反馈,调整抓取力度和姿态,确保精准地抓取零件。
(4)搬运与堆叠:机器人根据预设的堆叠方式和位置,将零件搬运至指定区域,并进行精准堆叠。
4、程序实现
(1)使用合适的编程语言和开发环境,如Python和Robot Operating System(ROS)等,编写机器人码垛程序。
(2)通过视觉传感器获取零件信息,并处理图像数据,识别零件的位置和形状。
(3)根据零件信息,规划机器人的运动路径和抓取操作。
(4)实现机器人的自动控制功能,包括启动、停止、紧急停止等。
5、程序测试与优化
在实际生产线上进行程序测试,包括零件的抓取、搬运和堆叠等操作,根据测试结果,对程序进行优化和改进,提高机器人的工作效率和稳定性。
实际应用效果
通过实际应用,该机器人码垛程序实现了金属零件的自动化搬运和堆叠,提高了生产效率和降低了人工成本,机器人码垛系统具有高度的灵活性和适应性,能够适应不同形状、大小和重量的零件,降低了生产线的运营成本。
本文通过一个具体的实例,介绍了机器人码垛程序的设计、实现及其在自动化生产线上的应用,通过合理的程序设计和实现,机器人码垛系统可以实现自动化生产线上的智能搬运,提高生产效率和降低运营成本,随着技术的不断发展,机器人码垛系统将在更多领域得到应用,为工业自动化的发展做出更大的贡献。
 桂ICP备2021008493号-1
桂ICP备2021008493号-1